不同控制算法在制药洁净室压差控制中的对比分析
刘宇航1,马晓钧2,艾凡彪2,黄春娥2
1. 天津工业大学机械工程学院; 2. 北京联合大学生物化学工程学院
【摘 要】在制药洁净厂房的房间压差控制中,采用不同的控制算法会导致对扰动消除或降低的不同结果,进而会影响洁净室的压差以及洁净度的保障效果。本文分别针对自抗扰控制算法和传统PID控制算法,利用Matlab/Simulink仿真平台,对典型制药洁净室在开关门扰动作用下的各个洁净房间压差变化特点进行了对比分析。通过与传统PID控制算法的对比,说明自抗扰控制算法在制药洁净室压差控制上具有可行性,进而为制药厂房空调系统降低风量冗余和节省输配能耗提供技术保障。
【关键词】自抗扰控制;PID控制;制药厂房;压差控制
【基金项目】该论文由国家重点研发计划项目“洁净空调厂房的节能设计与关键技术设备研究”(课题编号:2018YFC0705204)资助
Abstract: In pharmaceutical cleanrooms, the reasonable control system of pressure difference can obtain different responses based on eliminating disturbances, even though influence the result of maintaining pressure differential and room cleanliness class. In the paper, active-disturbance-rejection-control and traditional PID control are chosen, the system’s model is built in Matlab/Simulink surrounding, comparative research of the cleanroom’s pressure difference are done when door’s disturbance happens. The simulations show that the active-disturbance-rejection-control can be used to the pressure difference control of cleanroom, and receive good control response. The study supports technique guarantee in decreasing redundancy and saving energy of HVAC System in pharmaceutical cleanrooms.
Keywords: active-disturbance-rejection-control;PID control; pharmaceutical cleanroom;pressure difference control
0 引 言
制药厂房的洁净车间具有多个隔间且洁净度等级不同的特点,因此,洁净室的压差控制对于维持洁净度等级、防止污染物扩散起着至关重要的作用。但是通常情况下,洁净室在运行过程中会有扰动的存在,如门的开启、人员的走动等,对于压差都会有很大的影响[1,2]。针对这些扰动,选择高效的控制方法,维持设定的压差(符合国家标准[3]),防止交叉感染,是制药洁净厂房压差控制的关键。
对于有扰动情况下的压差动态控制调节,传统的PID控制是应用最广泛的一种闭环控制方法。该方法已经在洁净室的压差控制得到了应用[4],但多隔间且洁净等级不同的制药洁净室,需要其控制系统具有高精度、强抗扰的特点,才能达到维持压差和洁净度的保障要求。因而从鲁棒性、响应速度、系统的稳定性等方面上分析,传统PID控制仍有许多不足之处。自抗扰控制 (active-disturbance-rejection-control,ADRC) 算法自提出以来,已经成功应用于火力发电系统[5-8]、空调系统[9],航空航天[10]、磁悬浮[11]、系统散热[12],尼龙管挤压生产线 [13],德州仪表的运动芯片[14]等,并在这些领域发挥了重要的作用。但是将ADRC算法应用到制药洁净厂房的压差控制,其应用的可行性和效果还有待研究。文本以一个综合制药厂房的洁净房间作为研究对象,分别采用传统PID控制算法和ADRC算法对于常见的扰动情况进行研究,对比分析在扰动作用下的各个洁净房间压力变化特点,对将ADRC算法应用于制药洁净室压差控制的可行性进行探讨。
1 Simulink仿真模型及工况设置
本文研究对象抽象成的房间模型俯视图如图1所示,图中标出了影响压力的各个变量。该洁净室通过推拉门连接与外界洁净走廊相通,走廊压差P0为5Pa,非洁净生产区(surrounding)压差也为5Pa,洁净室设定压差为37.5Pa,图中不同颜色表示不同压力区域。洁净室内部分别设有一个送风口(送风量为min)和一个排风口(排风量为mout),送风温度为20℃,整个空间内有空气泄漏量(mout_variable),由两部分组成,即围护结构泄漏量(mout_variable I)和门窗缝隙泄漏量(mout_variable II),该模型的参数符合GMP国家标准[3]。
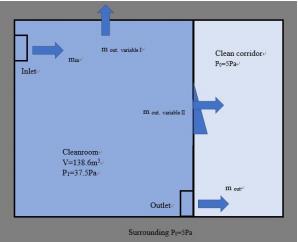
图1 洁净房间变量分析图
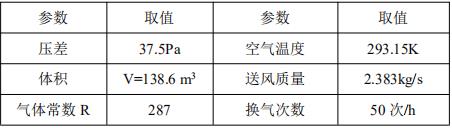
根据空气质量守恒定理获得洁净车间的模型[15],在Matlab/Simulink中搭建仿真模型,如图2所示。当t=0时,计算出维持洁净车间设定压差值37.5Pa所需的送风量、排风量等参数,见表1,维持固定的送、排风量使房间压差保持在设定值,满足生产要求。当出现泄压扰动时,房间压力降低,控制器调节风阀增加送风量,使室内压差回到设定值。
表1 洁净车间参数的设置
当出现开门扰动时,在此送风量基础上增加送风量以维持预期房间压力。
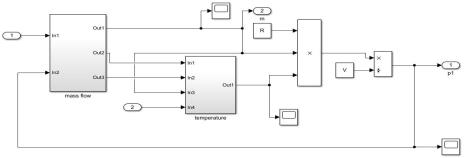
图2 Simulink中洁净间模型封装图
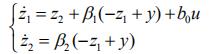
本文选用的线性自抗扰控制器 (linear-active-disturbance-rejection-control,LADRC)来主动调节洁净间的压差,其线性扩张状态器(linear extended-state-observer,LESO)表达式如下:
 (1) ,
(1) ,
其中u和y分别为被控对象的输入和输出,β1和β2是观测器增益,Z1和Z2分别是对输出和系统总扰动的估计量。LADRC的控制律如下:
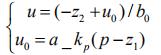 (2)
(2)
LADRC的框图如图3所示:
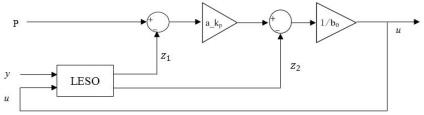
图3 LADRC结构框图
2 仿真结果分析与讨论
2.1 被控对象开门扰动
本文中分别设计送风量调整的PID控制和LADRC控制策略,整定控制器参数使系统稳定。在t=25s时,洁净车间操作人员进出房间开门造成房间内压力瞬间减低,控制算法实时调节送风量使房间压差回到设定值,观察PID控制和LADRC控制策略总洁净室压差的变化,如图4所示。
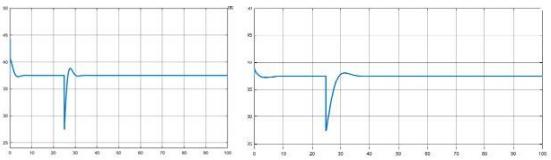
图4 PID与LADRC算法开门扰动压力仿真输出比较
仿真结果表明,针对在洁净室内人员走动开门的强扰动,LADRC算法超调量比PID算法小。无论是在仿真开始时刻还是在25s后出现洁净室开门扰动,自抗扰控制算法超调量很小,基本在5Pa以内,而PID控制算法对于开门扰动超调量比自抗扰控制算法大。
2.2 走廊开门扰动
场景模拟概况:(1)当有人员通过走廊门进出生产区时,会造成走廊压力波动,洁净走廊压力从5Pa降到1Pa,再从1Pa恢复到5Pa的过程,整个泄压到恢复过程持续时间为4s,泄压过程与恢复过程所经历时间相同。在仿真开始第25s开始泄压,第29s结束;(2)当生产区进行物料装卸时,走廊门长时间保持打开状态。此时走廊压力会降到0Pa,开门仿真时间为开始的第60s,两秒后压力降到0Pa。PID与LADRC控制算法对净间的压差控制比较如图5所示。
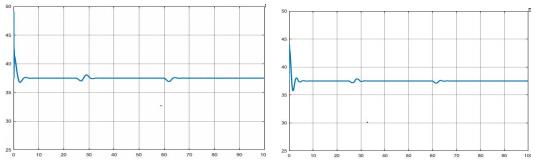
图5 PID(左)和LADRC(右)控制响应图
从LADRC算法与PID控制算法响应效果对比发现,自抗扰控制算法在初值鲁棒性方面要略好于PID控制算法,在出现扰动时,LADRC的压差超调量小于PID控制,有较好的稳定性。
2.3 洁净车间压力的相互影响
洁净车间之间压差相互耦合,为研究洁净车间开关门对邻室的压力的影响,在图1的基础上增加一个B级洁净区房间B,已有的洁净室A为A级洁净区。A房间开门时,房间内压力骤减,需增加送风量以维持设定的压差,导致主干风管上顺着送风方向送风量减少,从而B房间送风的支管上送风量减少。
利用两套闭环控制系统分别控制A房间和B房间的压差,观察A房间压力输出对B房间压差控制效果的影响。在两种工况下,不同控制算法对 A,B房间压差的控制如表2所示。
表2 LADRC与PID控制压力输出
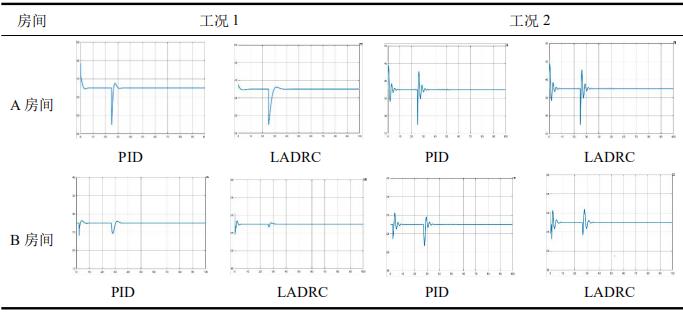
从以上仿真结果可看出,工况一A房间的PID控制效果相对理想,其初值时刻鲁棒性、超调量、稳态误差方面都优于工况二,而工况一B房间的控制效果在初值鲁棒性、超调量、稳态误差方面也明显好于工况二。所以A房间的控制效果好坏会直接影响到B房间最终的控制效果。从以上A、B房间压力仿真输出结果可推知,洁净区内房间自身出现开门扰动时的调控效果好坏会对邻室及周围相近洁净室压力产生较大影响。以上仿真可以根据实际情况推广到多个车间的压差控制中。
3 总结
本文分别从自身出现扰动的角度及外界扰动角度出发来建立模型,分别选取了洁净制药车间内工艺生产过程中几种比较常见的、典型的泄压情况来设置算例,并对每种算例最终的调控效果都进行分析评价,从以上的仿真结果可得到以下两个结论:(1) PID控制算法和LADRC算法基本都能通过调节最终使系统回到稳态,也就是最初的压差设定值;(2) LADRC算法在以上设置的几种算例中调控效果总体来说好于PID控制算法。在本文中,评价调控效果好坏的标准主要有以下几方面:出现扰动后对于扰动调节时的响应速度、压力超调量、以及系统的稳定性。
本文中通过仿真验证了LADRC在控制洁净厂房压差的有效性,该算法特殊的结构决定了它可以利用LESO对房间所受扰动进行实时估计并消除,增强了系统抗扰动的能力,这是经典PID控制算法所不具备的。在制药洁净厂房压差控制中,我们还将继续研究更适合的自抗扰控制策略,更进一步为制药厂房空调系统降低风量冗余和节省输配能耗提供技术保障。
参考文献:
[1] Yang-Cheng Shih. Dynamic airflow simulation within an isolation room [J]. Building and Environment, 2007, 42: 3194–3209.
[2] J.-I. Choi. Large eddy simulation and zonal modeling of human-induced contaminant transport. Indoor Air, 2008, 18: 233–249.
[3] 国家食品药品监督管理局.药品生产质量管理规范(2010年修订)[S]. 2011(in chinese).
[4] Wei Sun PE. Automatic Room Pressurization Test Technique and Adaptive Flow Control Strategy in Cleanrooms and Controlled Environments. ASHRAE Transactions, 2005, Volume III, Part 2.
[5] Huang Chun-E, Li Donghai, Xue Yali. Active disturbance rejection control for the ALSTOM gasifier benchmark problem [J]. Control Engineering Practice, 2013, 21(4), 556–564.
[6] Sun L, Li D, Hu K, et al. On tuning and practical implementation of active disturbance rejection controller: a case study from a regenerative heater in a 1000 MW power plant [J]. Industrial & Engineering Chemistry Research, 2016, 55(23), 6686–6695.
[7] Huang Chun-E, Liu zhongli, Multi-objective optimization for decentralized PI control of the ALSTOM Benchmark Problem[C]. Chinese Control Conference, Hangzhou, 2015, 07.
[8] Huang Chun-E, Li Donghai. Multi-objective optimization for active disturbance rejection control for the ALSTOM benchmark problem[C]. Chinese Control and Decision Conference, Qingdao, 2015: 23–25.
[9] Huang Chun-E, Li Chunwang, Ma Xiaojun. Active-disturbance-rejection-control for temperature control of the HVAC system [J]. Intelligent Control and Automation, 2018, 9: 1–9.
[10] 薛文超, 黄朝东, 黄一. 飞行制导控制一体化设计方法综述[J]. 控制理论与应用, 2013, 30(12), 1511–1520.
[11] Wei Wei, Wenchao Xue, Donghai Li. On disturbance rejection in magnetic levitation [J]. Control Engineering Practice, 2018, 82: 24–35.
[12] Qinling Zheng, Zhan Ping, Simone Soares, Yu Hu, Zhiqiang Gao. An optimized active disturbance rejection approach to fan control in server [J]. Control Engineering Practice, 2018, 79: 154–169.
[13] ZHENG Q, GAO Z Q. An energy saving, factory-validated disturbance decoupling control design for extrusion process [C] //World Congress on Intelligent Control and Automation. Beijing: IEEE, 2012: 2891–2896.
[14] Achieve improved motion and efficiency for advanced motor control designs in minutes with TI’s new Insta SPIN(TM)–MOTION technology, The Wall Street Journal, April 18, 2013 at http: //online.wsj. com/article/PR – CO – 20130418 – 907338.html ? mod = googlenewswsj.
[15] A.H.T.M. van den Brink, A.W.M. van Schijndel. Improved control of the pressure in a cleanroom environment[J]. BUILD SIMUL, 2012, 5: 61–72.
备注:本文收录于《建筑环境与能源》2020年10月刊 总第37期(第22届全国暖通空调制冷学术年会文集)。版权归论文作者所有,任何形式转载请联系作者。